View Factor Orientation (or View factor or shape factor) plays an important role in radiation heat transfer. View factor is defined as, "fraction of radiation leaving surface 'i' and strike 'j' ". Summation Rule (View Factor) If there is are similar surfaces 'i' and 'j' , then: Blackbody Radiation Exchange Radiation Exchange between Opaque, Diffuse, Gray surfaces in an Enclosure 1. Opaque 2. Surfaces 3. Two surface enclosure Radiation Shield It is used to protect surfaces from radiation act like a reflective surface. References: Material from Class Lectures + Book named Fundamentals of Heat and Mass Transfer by Theodore L. Bergman + My knowledge. Photoshoped pics are developed. Some pics and GIF from Google. Videos from YouTube ( Engineering Sights ).
Get link
Facebook
X
Pinterest
Email
Other Apps
Equilibrium of a Particle and Force System Resultants
Get link
Facebook
X
Pinterest
Email
Other Apps
-
Equilibrium of a Particle
Equilibrium:
A particle is said to be in equilibrium if it remains at rest or moving with constant velocity and does not rotate about any axis.
This condition of rest or moving with constant velocity is also called Static Equilibrium.
Coplanar Force Systems:
If a particle is subjected to a system of coplanar forces that lie in the x-y plane then every forces can be resolved into its components.
Since, it is 2D so the equilibrium equations are:
Σ Fx = 0
Σ Fy = 0
3D Force System:
In case of three-dimensional force system, we can resolve the forces into their respective rectangular components.
So the equations of equilibrium are:
Σ Fx = 0
Σ Fy = 0
Σ Fz = 0
Force System Resultants
When a force is applied to a body it will produce a tendency of rotation of body about a point which us not on the line of action of force.
Moment of a Force (Scalar Formulation):
In this sense, the momen is considered as scalar and us calculated as:
Moment = (Force) × (Moment Arm)
M = Fd
Cross Product Formulation of Moment of A Force:
The moment of a force will be formulated using Cartesian vectors is given by:
Principle of Moment:
Principle of moment or Varignon's Theorem states that:
The moment of a force about a point is equal to the sum of the moments of the components of the force about that point.
This method is generally easier than finding the same moment using M = Fd.
Moment of a Force about a Specified Axis:
To determine the turning effect of a force, we can use scalar or vector analysis.
1. Scalar Analysis:
By using the scalar analysis of Turning effect of a force, we have:
M = Fd
2. Vector Analysis:
The vector analysis of moment of a force about an axis is given by:
Couple:
It is defined as:
Two parallel forces that have the same magnitude bit opposite directions and are separated by a distance (d).
Moment of Couple:
The moment produced by a couple is called Moment of a Couple.
We determine the moment of Couple of a system by the algebraic sum of moments acted on the object, which is given by:
M = Ma + Mb
Couple moment is a free vector, so it only depends on the position vector between the forces.
There are two analysis of formulating couple moment:
1. Scalar Formulation:
The moment of Couple by using scalar Formulation is given by :
M = Fd
2. Vector Formulation:
The moment of Couple by using vector Formulation is given by:
M = r × FΣ
Equivalent Couples:
If two couples produce a moment with the same magnitude and direction, then these two couples are equivalent.
Resultant Couple Moment:
Since, couple moments are vectors, their resultant can be determined by vector addition.
M = Σ(r × F)
Or
Resultant Force = ΣF
Resultant Moment = ΣM at origin + ΣM
Or
Resultant Force along x = ΣFx
Resultant Force along y = ΣFy
Resultant Moment at O = ΣMo + ΣM
Reduction of a Simple Distributed Loading:
A uniformly distributed load is a load that is distributed or spread across the whole region of an element. In other words, the magnitude of the load remains uniform throughout the whole element.
Magnitude of Resultant Force:
The Magnitude of resultant force Fr is equivalent to the sum of all the forces in the system, which is given by:
Location of Resultant Force:
The location of force or the geometric center or centroid of the area under the distributed loading is given by:
And, the location of centroid of area under distributive loading for different shapes are:
TAPING CORRECTIONS There are two types of corrections depending upon the type of errors in tape due to the different conditions. 1. Systematic Errors : Slope Erroneous tape length Temperature Tension Sag 2. Random Errors : Slope Alignment Marking & Plumbing Temperature Tension & Sag 1. Temperature Correction It is necessary to apply this correction, since the length of a tape is increased as its temperature is raised, and consequently, the measured distance is too small. It is given by the formula, C t = 𝛼 (T m – T o )L Where, C t = the correction for temperature, in m. 𝛼 = the coefficient of thermal expansion. T m = the mean temperature during measurement. T o = the tempe...
Projection: The term Projection is defined as: Presentation of an image or an object on a surface. The principles used to graphically represent 3-D objects and structures on 2-D media and it based on two variables: Line of Sight. Plane of Projection. Line of Sight & Plane of Projection: Line of sight is divided into 2 types: Parallel Projection Converging Projection & A plane of projection is an imaginary flat plane upon which the image created by the lines of sight is projected. Orthographic Projection: When the projectors are parallel to each other and perpendicular to the plane of projection. The lines pf sight of the observer create a view on the screen. The screen is referred to as the Plane of Projection (POP). The lines of sight are called Projection lines or projectors. Rules of Orthographic Projection: Edges that are parallel to a plane of projection appear as lines. Edges that are incl...
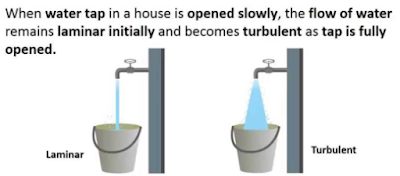
Reynolds Number: Reynolds Number is the ratio of Inertial forces to the Viscous forces. By knowing this number, one can describe the flow whether the flow is laminar, turbulent or transitional flow. There are three possibilities of the range of Reynolds Number: If Reynolds number < 2100 or 2300 ⟺ Laminar Flow If Reynolds number > 4000 ⟺ Turbulent Flow If 2300 < Reynolds number < 4000 ⟺ Transitional Flow In case of different shapes other than circle, the formula for Reynolds Number remain the same however diameter involves in the formula become Hydraulic Diameter which is given by: For pipe: Critical Reynolds Number ⟾ The Reynolds number at which the flow becomes turbulent Re cr For different shapes, the hydraulic diameters are given by: Completely Filled Flow In Closed Channel: If pipe is is considered to filled completely with closed channel, then following are the conditions which...















You can better get Engineering statics material from YouTube by the same name engineering statics
ReplyDelete